To demonstrate the functionality of CERA we needed a platform that would enable it to interact with humans. CERA processes the events it receives, but it is dependent upon some other program to supply the data regarding what is happening in the world. The ER1 Robot by Evolution Robotics and the Evolution Robotics Software Platform (ERSP) provide this capability with a straightforward, event-based API.
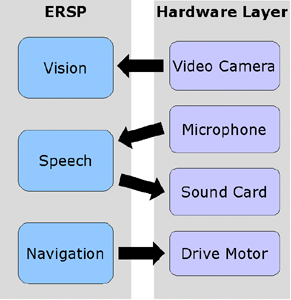
 Object Detection is made available through the ERSP Vision library. Using this library one can create model sets, which are pictures of objects. The ER1 robot looks for matches between objects in the environment and the model set. The objects are not limited to items and images of humans in different positions detect quite well. We used the ER1 robot to raise events when one of our objects was seen.
Object Detection is made available through the ERSP Vision library. Using this library one can create model sets, which are pictures of objects. The ER1 robot looks for matches between objects in the environment and the model set. The objects are not limited to items and images of humans in different positions detect quite well. We used the ER1 robot to raise events when one of our objects was seen.
 Speech Recognition is made available through the ERSP Speech library, which is built on top of IBM's ViaVoice software. Using this library, one can instruct the ER1 to listen for words defined by a custom speech grammar. This allowed us to receive events when a specified word or phrase was recognized.
Speech Recognition is made available through the ERSP Speech library, which is built on top of IBM's ViaVoice software. Using this library, one can instruct the ER1 to listen for words defined by a custom speech grammar. This allowed us to receive events when a specified word or phrase was recognized.
CERA | Skibbles | Evolution ER1